PID control offers a straightforward approach to regulating robotic systems by continuously adjusting control inputs based on error values, ensuring stability and simplicity in implementation. Adaptive control dynamically modifies its parameters in response to changing system behavior and external disturbances, providing improved performance in uncertain or time-varying environments. While PID is effective for well-modeled, stable systems, adaptive control excels in handling nonlinearities and unpredictable conditions common in advanced robotics applications.
Table of Comparison
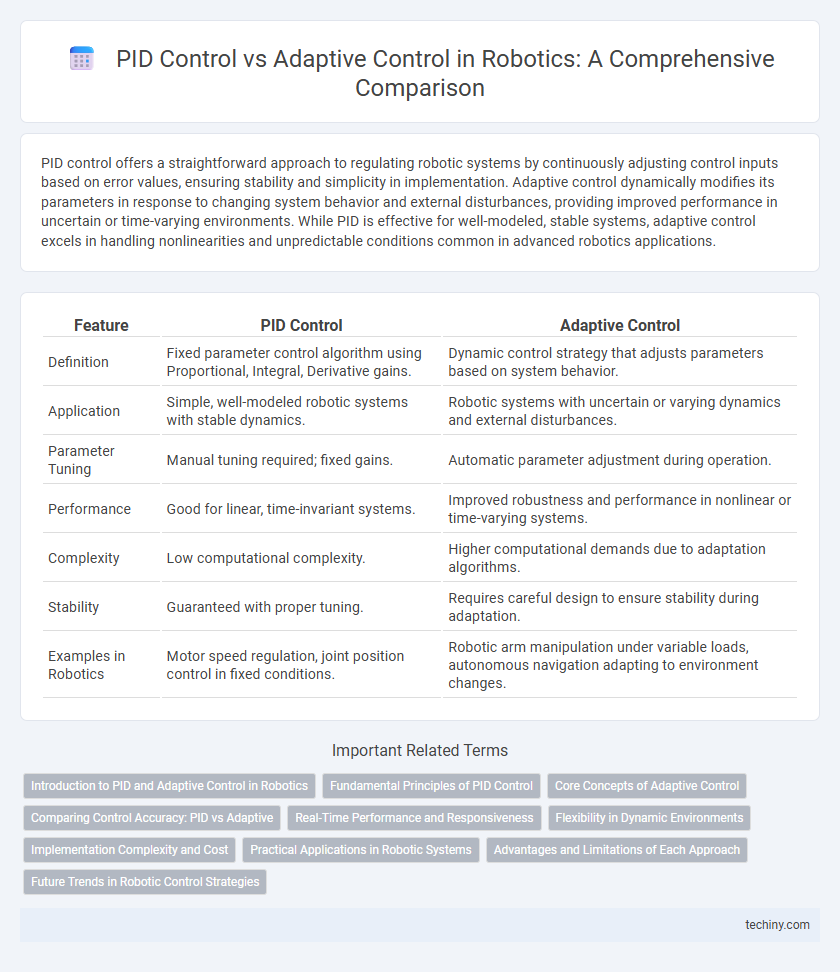
| Feature | PID Control | Adaptive Control |
|---|---|---|
| Definition | Fixed parameter control algorithm using Proportional, Integral, Derivative gains. | Dynamic control strategy that adjusts parameters based on system behavior. |
| Application | Simple, well-modeled robotic systems with stable dynamics. | Robotic systems with uncertain or varying dynamics and external disturbances. |
| Parameter Tuning | Manual tuning required; fixed gains. | Automatic parameter adjustment during operation. |
| Performance | Good for linear, time-invariant systems. | Improved robustness and performance in nonlinear or time-varying systems. |
| Complexity | Low computational complexity. | Higher computational demands due to adaptation algorithms. |
| Stability | Guaranteed with proper tuning. | Requires careful design to ensure stability during adaptation. |
| Examples in Robotics | Motor speed regulation, joint position control in fixed conditions. | Robotic arm manipulation under variable loads, autonomous navigation adapting to environment changes. |
Introduction to PID and Adaptive Control in Robotics
PID control in robotics relies on proportional, integral, and derivative terms to maintain precise system stability and accuracy by minimizing error between desired and actual positions. Adaptive control dynamically adjusts control parameters in real-time to handle system uncertainties and varying environmental conditions, enhancing robot performance in unpredictable scenarios. Comparing PID and adaptive control highlights traditional fixed-parameter effectiveness versus flexible, model-based adaptability crucial for advanced robotic applications.
Fundamental Principles of PID Control
PID control in robotics is based on three fundamental principles: proportional, integral, and derivative actions, which work together to minimize the error between a desired setpoint and the actual system output. The proportional component addresses present errors, the integral component eliminates accumulated past errors, and the derivative component predicts future errors by analyzing the rate of change. This combination allows PID controllers to provide stable and efficient performance in systems with relatively consistent dynamics, contrasting with adaptive control methods that adjust parameters in real-time for varying system behavior.
Core Concepts of Adaptive Control
Adaptive control in robotics dynamically adjusts control parameters in real-time to manage uncertainties and varying environmental conditions, unlike traditional PID control which relies on fixed gains. It uses algorithms such as model reference adaptive systems (MRAS) or self-tuning regulators to continuously estimate system dynamics and optimize performance. This capability enables robotic systems to maintain stability and improve precision in complex, nonlinear, or time-varying tasks.
Comparing Control Accuracy: PID vs Adaptive
PID control delivers consistent accuracy in systems with predictable dynamics by maintaining error correction through proportional, integral, and derivative adjustments. Adaptive control enhances accuracy by continuously adjusting controller parameters in real-time to accommodate varying system dynamics and external disturbances. In robotics, adaptive control typically outperforms PID in environments with nonlinearities or uncertainties, ensuring superior precision and stability.
Real-Time Performance and Responsiveness
PID control offers reliable real-time performance with straightforward tuning, ensuring quick response times in stable robotic systems. Adaptive control enhances responsiveness by dynamically adjusting parameters to cope with system uncertainties and varying environments, improving robustness in complex tasks. For robotics applications demanding high precision under changing conditions, adaptive control delivers superior real-time adaptability compared to fixed-gain PID controllers.
Flexibility in Dynamic Environments
PID control offers stable and predictable behavior in well-defined, static environments but struggles with varying dynamics and non-linearities in complex robotic systems. Adaptive control continuously adjusts controller parameters in real time, enhancing flexibility and performance in dynamic environments with uncertain or changing conditions. This adaptability makes adaptive control more suitable for robots operating in unstructured or unpredictable settings where environmental variables fluctuate rapidly.
Implementation Complexity and Cost
PID control in robotics offers straightforward implementation with low computational requirements, making it cost-effective for systems with relatively stable dynamics. Adaptive control requires more sophisticated algorithms and real-time parameter estimation, increasing both implementation complexity and hardware costs. While PID controllers excel in simplicity and affordability, adaptive control provides enhanced performance in uncertain or dynamic environments at the expense of higher development and operational expenses.
Practical Applications in Robotic Systems
PID control remains widely used in robotic systems for tasks requiring stable, predictable performance due to its simplicity and effectiveness in linear environments. Adaptive control excels in complex or nonlinear robotic applications where system parameters vary or are uncertain, enabling real-time tuning for enhanced precision and robustness. Practical implementations often combine PID for baseline stability with adaptive algorithms to handle dynamic changes and improve overall system responsiveness.
Advantages and Limitations of Each Approach
PID control offers simplicity, ease of implementation, and reliable performance in linear and time-invariant robotic systems, making it suitable for industrial robots with predictable dynamics. Its limitations include reduced effectiveness in handling nonlinearities, system parameter variations, and external disturbances, which can lead to suboptimal performance or instability. Adaptive control, by contrast, excels in managing uncertainties and changing environments through real-time parameter adjustment, but it requires more computational resources and complex tuning, possibly causing slower response and instability if not designed properly.
Future Trends in Robotic Control Strategies
Future trends in robotic control strategies emphasize integrating adaptive control with machine learning algorithms to enhance system responsiveness and robustness in dynamic environments. Emerging PID control developments focus on real-time parameter tuning using AI to maintain precision while reducing computational complexity. Hybrid approaches combining PID simplicity with adaptive control flexibility are gaining traction for autonomous robots operating in unpredictable, unstructured settings.
PID control vs Adaptive control Infographic