Behavior-based robotics emphasizes real-time interaction with the environment through reactive control systems, enabling robots to respond swiftly to dynamic situations without relying heavily on internal models. Deliberative robotics, in contrast, uses detailed internal representations and planning algorithms to make decisions based on predictions and precomputed strategies. While behavior-based approaches excel in adaptability and robustness, deliberative methods offer improved long-term goal achievement and complex task management.
Table of Comparison
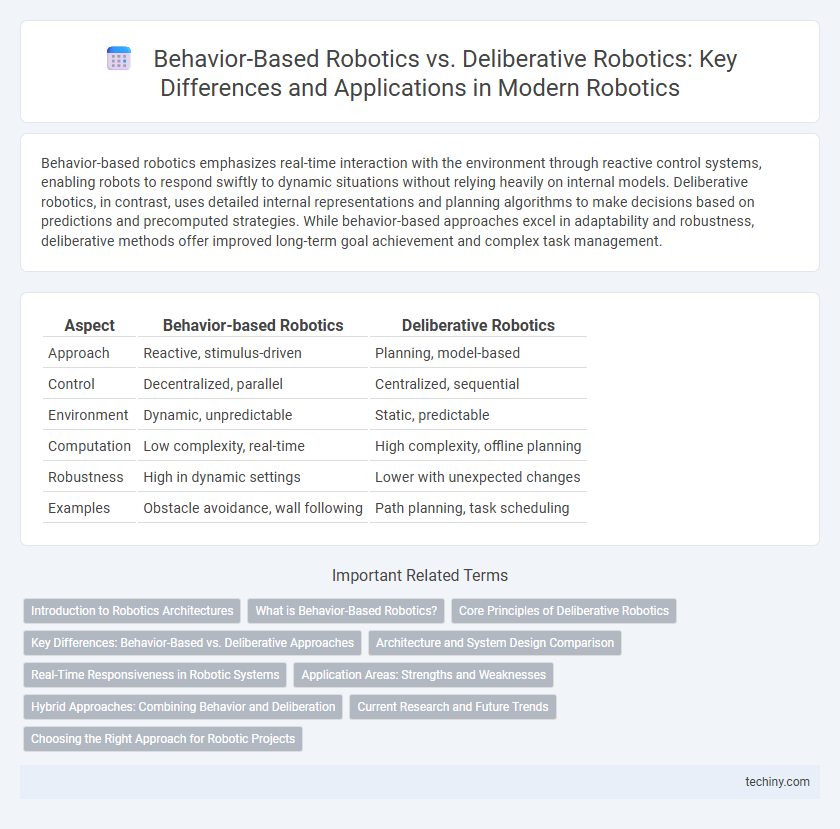
| Aspect | Behavior-based Robotics | Deliberative Robotics |
|---|---|---|
| Approach | Reactive, stimulus-driven | Planning, model-based |
| Control | Decentralized, parallel | Centralized, sequential |
| Environment | Dynamic, unpredictable | Static, predictable |
| Computation | Low complexity, real-time | High complexity, offline planning |
| Robustness | High in dynamic settings | Lower with unexpected changes |
| Examples | Obstacle avoidance, wall following | Path planning, task scheduling |
Introduction to Robotics Architectures
Behavior-based robotics emphasizes real-time interactions with the environment through decentralized control systems that enable robots to perform tasks using simple, reactive behaviors. Deliberative robotics relies on comprehensive internal models and planning algorithms, allowing robots to analyze complex data and make informed decisions before acting. In robotics architectures, behavior-based approaches offer robustness and adaptability, while deliberative systems provide precision and long-term goal orientation.
What is Behavior-Based Robotics?
Behavior-based robotics is an approach where robots operate through decentralized control systems using simple, reactive behaviors triggered by sensory inputs. This paradigm emphasizes real-time interaction with dynamic environments without relying on complex internal models or extensive planning processes. These robots adapt quickly to changes and uncertainties, making them ideal for tasks requiring robust and flexible responses.
Core Principles of Deliberative Robotics
Deliberative robotics relies on symbolic representation and planning, where robots generate explicit internal models of the environment to perform sequential decision-making. Core principles include pre-defined world models, logical reasoning, and task decomposition to plan actions before execution. This approach contrasts with behavior-based robotics by emphasizing high-level cognition and foresight to achieve complex goals.
Key Differences: Behavior-Based vs. Deliberative Approaches
Behavior-based robotics relies on decentralized control using multiple simple behaviors that interact directly with the environment, enabling real-time responses without extensive internal models. Deliberative robotics depends on centralized planning with comprehensive world models, using symbolic reasoning and sequential decision-making to achieve complex tasks. Key differences include behavior-based systems prioritizing adaptability and robustness, while deliberative systems emphasize accuracy and long-term goal optimization.
Architecture and System Design Comparison
Behavior-based robotics architecture emphasizes decentralized control with multiple simple behavior modules operating in parallel, enabling real-time responsiveness and robustness to dynamic environments. In contrast, deliberative robotics relies on centralized, model-based system design involving symbolic reasoning and planning layers that construct detailed world representations for goal-directed actions. The system design choice impacts computational complexity, adaptability, and performance in tasks requiring rapid environmental interaction versus long-term strategic planning.
Real-Time Responsiveness in Robotic Systems
Behavior-based robotics excels in real-time responsiveness by utilizing decentralized control architectures that enable robots to react swiftly to dynamic environmental changes without relying on extensive computations. Deliberative robotics, while capable of complex and planned actions, often suffers from latency due to its reliance on internal models and sequential decision-making processes. Real-time responsiveness in robotic systems is thus enhanced by behavior-based approaches, which prioritize immediate sensor-driven actions over deliberative, model-based reasoning.
Application Areas: Strengths and Weaknesses
Behavior-based robotics excels in dynamic, unpredictable environments such as search and rescue or robotic vacuum cleaning due to its real-time responsiveness and robustness against sensor noise. Deliberative robotics is advantageous in structured settings like industrial automation and surgical robotics, where precise planning and complex decision-making are critical, though it suffers from slower adaptability and higher computational demands. Both paradigms face trade-offs: behavior-based systems struggle with long-term planning, while deliberative models can be brittle in rapidly changing conditions.
Hybrid Approaches: Combining Behavior and Deliberation
Hybrid robotics architectures integrate behavior-based and deliberative methods to leverage real-time adaptability with long-term planning, optimizing robotic performance in complex environments. These systems employ low-level reactive behaviors for immediate responses while utilizing high-level deliberation for goal-oriented decision-making and strategic planning. By combining sensory-driven reflexes with cognitive processing, hybrid approaches enhance robustness, flexibility, and efficiency in autonomous robots navigating dynamic and unpredictable scenarios.
Current Research and Future Trends
Current research in behavior-based robotics emphasizes real-time adaptive systems that utilize decentralized control to improve robotic autonomy in unstructured environments. Deliberative robotics advances incorporate sophisticated models for planning and decision-making, leveraging artificial intelligence and machine learning to enhance long-term goal achievement. Future trends likely involve hybrid architectures combining reactive behavior-based methods with deliberative planning to optimize robustness and flexibility in complex dynamic settings.
Choosing the Right Approach for Robotic Projects
Behavior-based robotics excels in dynamic environments requiring real-time responses through decentralized control systems, making it ideal for tasks with unpredictable variables. Deliberative robotics relies on comprehensive planning and world modeling, suited for structured settings where precision and sequential task execution are critical. Selecting the appropriate approach depends on project goals, environmental complexity, and the need for adaptability versus planned actions.
Behavior-based robotics vs Deliberative robotics Infographic