Series elastic actuators integrate compliant elements between the motor and load, enhancing force control accuracy and shock tolerance in robotic applications. Direct-drive actuators eliminate transmission components, offering high precision and responsiveness with minimal backlash but can struggle with torque density and energy efficiency. Choosing between the two depends on application demands for compliance, control fidelity, and mechanical simplicity.
Table of Comparison
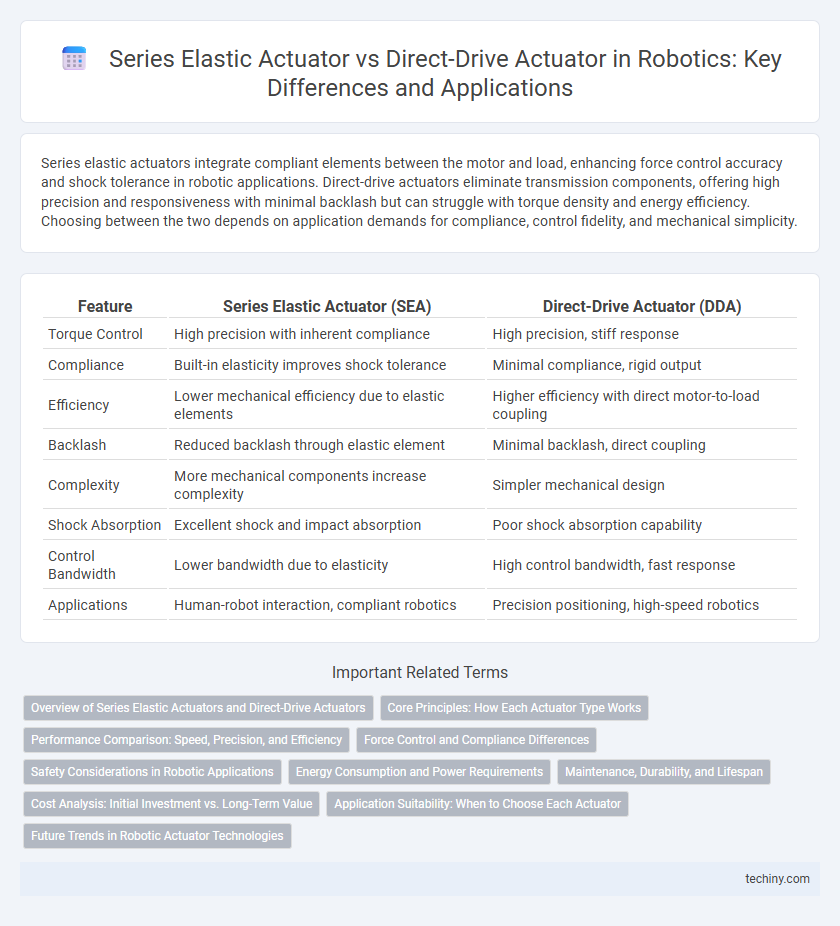
| Feature | Series Elastic Actuator (SEA) | Direct-Drive Actuator (DDA) |
|---|---|---|
| Torque Control | High precision with inherent compliance | High precision, stiff response |
| Compliance | Built-in elasticity improves shock tolerance | Minimal compliance, rigid output |
| Efficiency | Lower mechanical efficiency due to elastic elements | Higher efficiency with direct motor-to-load coupling |
| Backlash | Reduced backlash through elastic element | Minimal backlash, direct coupling |
| Complexity | More mechanical components increase complexity | Simpler mechanical design |
| Shock Absorption | Excellent shock and impact absorption | Poor shock absorption capability |
| Control Bandwidth | Lower bandwidth due to elasticity | High control bandwidth, fast response |
| Applications | Human-robot interaction, compliant robotics | Precision positioning, high-speed robotics |
Overview of Series Elastic Actuators and Direct-Drive Actuators
Series elastic actuators (SEAs) incorporate an elastic element between the motor and load, enhancing compliance and force control in robotic applications. Direct-drive actuators transmit power directly from the motor to the load, offering high precision and responsiveness with minimal mechanical complexity. SEAs excel in safety and shock absorption, while direct-drive actuators are favored for high-performance tasks requiring stiff, accurate motion control.
Core Principles: How Each Actuator Type Works
Series elastic actuators incorporate an elastic element between the motor and load, enabling precise force control and improved shock absorption by measuring deformation to estimate force output. Direct-drive actuators eliminate mechanical transmission components, providing high torque and velocity control through direct coupling of the motor to the load, resulting in lower friction and increased responsiveness. The core principle of SEA relies on the elastic element for force modulation, whereas DDA depends on direct motor-load interaction for accurate and immediate actuation.
Performance Comparison: Speed, Precision, and Efficiency
Series elastic actuators (SEAs) offer enhanced precision and shock tolerance by incorporating elastic elements that absorb impact and improve force control, making them ideal for applications requiring delicate manipulation. Direct-drive actuators (DDAs) excel in speed and dynamic response due to the absence of gearboxes, resulting in higher efficiency and reduced mechanical complexity. While SEAs provide better energy efficiency in force-sensitive tasks, DDAs outperform in pure speed and positional accuracy, optimizing performance depending on the specific robotic application.
Force Control and Compliance Differences
Series elastic actuators incorporate elastic elements between the motor and load, enhancing force control accuracy by absorbing shocks and providing inherent compliance, which improves interaction safety in robotics applications. Direct-drive actuators eliminate transmission components for high stiffness and precise motion control but lack intrinsic compliance, making force control more challenging under dynamic loads. The compliance advantage of series elastic actuators allows better force modulation and energy efficiency during contact-rich tasks compared to the rigid characteristics of direct-drive actuators.
Safety Considerations in Robotic Applications
Series elastic actuators (SEAs) enhance safety in robotic applications by incorporating compliant elements that absorb shocks and reduce the risk of injury during human-robot interaction. Direct-drive actuators offer precise control and high responsiveness but lack intrinsic compliance, increasing the potential for harm in unforeseen collisions. The integration of series elasticity is crucial in environments requiring safe physical human-robot collaboration, as it provides passive force control and energy absorption to mitigate impact forces.
Energy Consumption and Power Requirements
Series elastic actuators (SEAs) exhibit lower energy consumption due to their ability to store and release elastic energy, reducing peak power demands during dynamic tasks. Direct-drive actuators require higher continuous power input since they operate without mechanical compliance, leading to increased energy usage in prolonged operations. Optimizing actuator selection based on application-specific power profiles significantly impacts overall system efficiency and battery life in robotic systems.
Maintenance, Durability, and Lifespan
Series elastic actuators (SEA) incorporate elastic elements that absorb shocks, reducing mechanical wear and extending overall durability compared to direct-drive actuators (DDA), which have fewer components but experience higher stress on the motor and gears. Maintenance for SEAs often involves inspecting and replacing elastic components, whereas DDAs require more frequent attention to motor bearings and gear lubrication due to increased friction and heat. Lifespan analysis reveals SEAs generally achieve longer operational periods in dynamic robotic applications by mitigating impact forces, while DDAs excel in precision and responsiveness but may have shorter service life under heavy load conditions.
Cost Analysis: Initial Investment vs. Long-Term Value
Series elastic actuators typically require a higher initial investment due to their complex spring components and integrated sensors, which enhance precision and shock tolerance. Direct-drive actuators, while generally more affordable upfront, may incur greater long-term costs related to maintenance and limited shock absorption capabilities. Evaluating total cost of ownership reveals that series elastic actuators often provide better long-term value in applications demanding durability and energy efficiency.
Application Suitability: When to Choose Each Actuator
Series elastic actuators excel in applications requiring precise force control and compliance, such as prosthetics, wearable robots, and collaborative robots, due to their ability to absorb shock and reduce motor load. Direct-drive actuators are preferred in high-precision tasks demanding fast response and minimal friction, like industrial automation and robotic arms. Selecting the appropriate actuator depends on the need for compliance and impact absorption versus high speed and accuracy in motion control.
Future Trends in Robotic Actuator Technologies
Series elastic actuators (SEAs) continue to dominate collaborative robots due to their inherent compliance and improved force control, enabling safer human-robot interaction and enhanced energy efficiency. Direct-drive actuators (DDAs) are advancing rapidly with improvements in torque density and precision, targeting high-speed and high-accuracy robotic applications such as surgical robots and drones. Future trends emphasize hybrid designs integrating SEA compliance with DDA responsiveness, alongside AI-enhanced adaptive control algorithms that optimize actuator performance in diverse environments.
Series elastic actuator vs Direct-drive actuator Infographic