Proprioceptive sensing in robotics involves the internal measurement of a robot's own position, motion, and force through sensors like encoders and gyroscopes, enabling precise control and stability. Exteroceptive sensing gathers information about the robot's external environment using cameras, LIDAR, or ultrasonic sensors, essential for navigation and obstacle detection. Integrating both sensing types enhances robotic autonomy by combining internal state awareness with environmental context.
Table of Comparison
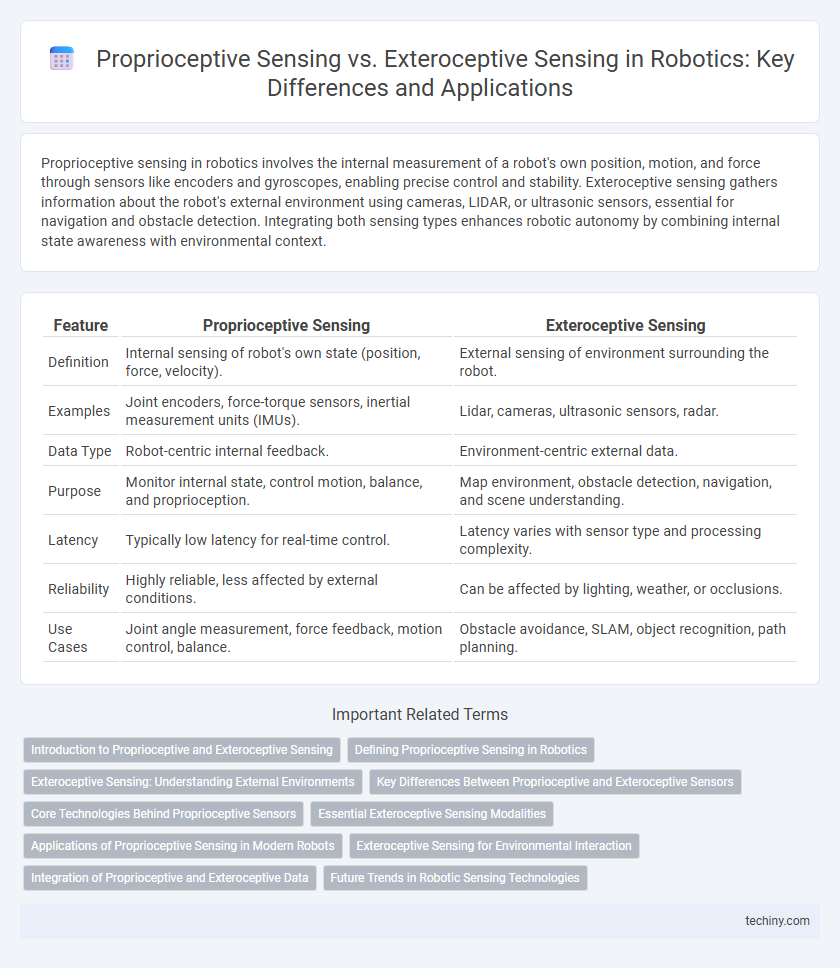
| Feature | Proprioceptive Sensing | Exteroceptive Sensing |
|---|---|---|
| Definition | Internal sensing of robot's own state (position, force, velocity). | External sensing of environment surrounding the robot. |
| Examples | Joint encoders, force-torque sensors, inertial measurement units (IMUs). | Lidar, cameras, ultrasonic sensors, radar. |
| Data Type | Robot-centric internal feedback. | Environment-centric external data. |
| Purpose | Monitor internal state, control motion, balance, and proprioception. | Map environment, obstacle detection, navigation, and scene understanding. |
| Latency | Typically low latency for real-time control. | Latency varies with sensor type and processing complexity. |
| Reliability | Highly reliable, less affected by external conditions. | Can be affected by lighting, weather, or occlusions. |
| Use Cases | Joint angle measurement, force feedback, motion control, balance. | Obstacle avoidance, SLAM, object recognition, path planning. |
Introduction to Proprioceptive and Exteroceptive Sensing
Proprioceptive sensing in robotics involves internal measurement of joint angles, motor currents, and actuator forces to enable accurate self-awareness of robot limb positions and movements. Exteroceptive sensing relies on external sensors such as cameras, LiDAR, and ultrasonic devices to gather environmental data for obstacle detection and spatial mapping. Integrating both proprioceptive and exteroceptive sensing enhances robot control systems by providing comprehensive situational awareness and precise motion feedback.
Defining Proprioceptive Sensing in Robotics
Proprioceptive sensing in robotics refers to the internal measurement of a robot's own state, including joint angles, motor currents, and body position, enabling precise control and coordination. This sensing modality relies on sensors such as encoders, accelerometers, and gyroscopes to provide feedback on the robot's posture and movement dynamics. Proprioceptive data is critical for tasks requiring accurate motion execution and adaptive interaction with the environment.
Exteroceptive Sensing: Understanding External Environments
Exteroceptive sensing in robotics involves detecting and interpreting external environmental stimuli through sensors like cameras, LiDAR, and ultrasonic devices, enabling robots to navigate complex surroundings and interact with objects accurately. This sensing modality provides critical spatial information, obstacle detection, and surface texture analysis, enhancing autonomous decision-making and real-time adaptability. Integrating exteroceptive data with proprioceptive feedback improves overall robotic perception and performance in dynamic and unstructured environments.
Key Differences Between Proprioceptive and Exteroceptive Sensors
Proprioceptive sensors measure internal states such as joint angles, motor currents, and body orientation, providing robots with self-awareness for balance and movement control. Exteroceptive sensors detect external environmental information like distance, temperature, and visual data through devices such as LiDAR, cameras, and ultrasonic sensors. The key difference lies in proprioceptive sensors monitoring internal mechanical conditions, while exteroceptive sensors gather data about the robot's surroundings.
Core Technologies Behind Proprioceptive Sensors
Core technologies behind proprioceptive sensors in robotics include strain gauges, accelerometers, and gyroscopes, which measure internal states such as joint angles, velocities, and forces within robotic limbs. Fiber optic sensors and piezoelectric sensors enhance precision by detecting micro-strains and vibrations essential for dynamic control. These technologies enable closed-loop feedback systems, allowing real-time adjustments that improve robot dexterity and environmental interaction accuracy.
Essential Exteroceptive Sensing Modalities
Essential exteroceptive sensing modalities in robotics include vision, lidar, sonar, and tactile sensors, which enable robots to perceive their external environment with high precision. Vision systems provide rich spatial and color information, lidar offers accurate distance measurements using laser pulses, and sonar sensors detect obstacles through ultrasonic waves. Tactile sensors enhance environmental interaction by sensing touch, pressure, and texture, crucial for manipulation and navigation tasks.
Applications of Proprioceptive Sensing in Modern Robots
Proprioceptive sensing enables modern robots to monitor joint positions, velocities, and forces, crucial for precise motion control and balance maintenance in humanoid and industrial robots. Applications include robotic exoskeletons, where proprioceptive feedback enhances user movement and safety, and robotic manipulators that rely on internal sensors to perform delicate assembly tasks with high accuracy. This sensing modality also supports autonomous navigation by helping robots assess their body configuration in complex environments without relying solely on external data.
Exteroceptive Sensing for Environmental Interaction
Exteroceptive sensing in robotics involves collecting data from the external environment using sensors like cameras, LiDAR, and ultrasonic devices to enable precise environmental interaction and navigation. These sensors provide critical spatial, visual, and tactile information that help robots interpret surroundings, detect obstacles, and execute context-aware tasks effectively. By leveraging exteroceptive data, robots enhance situational awareness and improve performance in dynamic, unstructured environments.
Integration of Proprioceptive and Exteroceptive Data
Integrating proprioceptive and exteroceptive sensing in robotics enhances situational awareness by combining internal state estimation with external environmental perception. Proprioceptive sensors, such as joint encoders and IMUs, provide precise data on limb position and motion, while exteroceptive sensors like cameras and LiDAR capture spatial context and obstacles. Fusion algorithms, including Kalman filters and deep learning-based sensor fusion, optimize control accuracy and adaptability, enabling robots to operate robustly in dynamic environments.
Future Trends in Robotic Sensing Technologies
Future trends in robotic sensing technologies emphasize integrating advanced proprioceptive sensors, such as MEMS-based inertial measurement units (IMUs) and tactile arrays, to enhance robots' self-awareness and precise motion control. Simultaneously, exteroceptive sensors like LiDAR, stereo cameras, and hyperspectral imaging are evolving to provide richer environmental context and improved object recognition capabilities. The fusion of proprioceptive and exteroceptive data through AI-driven sensor fusion algorithms is driving the next generation of autonomous robots with superior adaptability and decision-making in complex, dynamic environments.
Proprioceptive sensing vs Exteroceptive sensing Infographic