Kalman filters provide optimal state estimation for linear systems with Gaussian noise, making them highly efficient and computationally light. Particle filters excel in nonlinear, non-Gaussian environments by using a set of particles to approximate the posterior distribution, offering greater flexibility at the cost of increased computational complexity. Choosing between Kalman and particle filters depends on the system dynamics and noise characteristics, with particle filters preferred for complex, highly uncertain robotic applications.
Table of Comparison
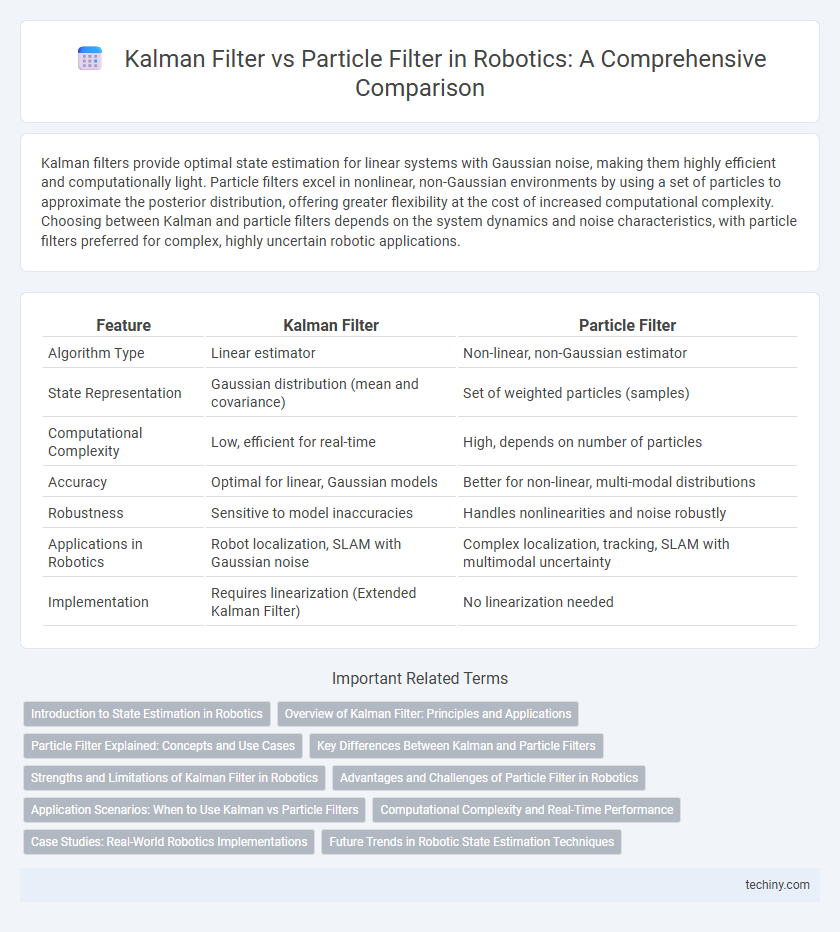
| Feature | Kalman Filter | Particle Filter |
|---|---|---|
| Algorithm Type | Linear estimator | Non-linear, non-Gaussian estimator |
| State Representation | Gaussian distribution (mean and covariance) | Set of weighted particles (samples) |
| Computational Complexity | Low, efficient for real-time | High, depends on number of particles |
| Accuracy | Optimal for linear, Gaussian models | Better for non-linear, multi-modal distributions |
| Robustness | Sensitive to model inaccuracies | Handles nonlinearities and noise robustly |
| Applications in Robotics | Robot localization, SLAM with Gaussian noise | Complex localization, tracking, SLAM with multimodal uncertainty |
| Implementation | Requires linearization (Extended Kalman Filter) | No linearization needed |
Introduction to State Estimation in Robotics
Kalman filters provide an efficient recursive solution to linear state estimation problems in robotics, leveraging Gaussian noise assumptions for real-time sensor fusion and motion tracking. Particle filters, also known as Sequential Monte Carlo methods, approximate posterior distributions in nonlinear, non-Gaussian systems by representing the state space with weighted particles, enabling robust localization and mapping. Both methods are foundational in probabilistic robotics, critical for accurate robot perception and navigation in complex environments.
Overview of Kalman Filter: Principles and Applications
The Kalman filter is a recursive algorithm that optimally estimates the state of linear dynamic systems by minimizing the mean of the squared error, relying on Gaussian noise assumptions. Its core principles involve time update (prediction) and measurement update (correction) steps, enabling real-time data fusion from noisy sensors. Widely applied in robotics for motion tracking, navigation, and sensor fusion, the Kalman filter excels in systems with linear models and Gaussian uncertainties.
Particle Filter Explained: Concepts and Use Cases
Particle filters in robotics employ a set of random samples, or particles, to represent the probability distribution of a robot's state, allowing robust localization and tracking in nonlinear, non-Gaussian environments. Unlike Kalman filters, particle filters can handle multimodal distributions and complex motion models, making them ideal for applications such as autonomous navigation in dynamic, uncertain environments. Use cases include simultaneous localization and mapping (SLAM), robot path planning, and target tracking, where accurate state estimation despite noise and occlusion is critical.
Key Differences Between Kalman and Particle Filters
Kalman filters assume linear Gaussian models, providing optimal state estimation for systems with Gaussian noise and dynamics, while particle filters handle nonlinear, non-Gaussian models using a set of random samples to represent the posterior distribution. Kalman filters offer computational efficiency and real-time performance but are limited in handling multimodal distributions, whereas particle filters output arbitrary distributions at higher computational costs suitable for complex, nonlinear problems. Kalman filters update state estimates recursively using mean and covariance, in contrast to particle filters which approximate the posterior with weighted particles through resampling and importance sampling techniques.
Strengths and Limitations of Kalman Filter in Robotics
The Kalman filter excels in robotics due to its computational efficiency and optimal performance in linear Gaussian systems, enabling real-time state estimation for robot localization and sensor fusion. Its limitations arise from assumptions of linearity and Gaussian noise, which reduce accuracy when dealing with nonlinear dynamics or non-Gaussian uncertainties often present in complex robotic environments. Despite these constraints, the Kalman filter remains a preferred choice for robots with well-modeled linear processes and moderate noise conditions.
Advantages and Challenges of Particle Filter in Robotics
Particle filters excel in robotics by effectively handling non-linear and non-Gaussian state estimation problems where Kalman filters struggle. They provide robust tracking in complex, dynamic environments through a set of weighted particles representing multiple hypotheses, enabling better localization and mapping. However, particle filters face challenges such as high computational cost due to the need for numerous particles and potential degeneracy issues requiring resampling strategies to maintain estimation accuracy.
Application Scenarios: When to Use Kalman vs Particle Filters
Kalman filters excel in linear Gaussian systems such as robot localization and sensor fusion where noise is Gaussian and models are well-defined. Particle filters are preferred in nonlinear, non-Gaussian environments including robotics with complex dynamics or multimodal distributions like simultaneous localization and mapping (SLAM) in cluttered environments. Choosing the filter depends on the computational constraints and the nature of system dynamics, with Kalman filters being computationally efficient and particle filters offering flexibility for complex, uncertain scenarios.
Computational Complexity and Real-Time Performance
Kalman filters offer lower computational complexity, relying on linear algebra operations with polynomial time complexity, making them ideal for real-time robotic applications with limited processing power. Particle filters require significantly higher computational resources due to sampling and weight updates, often leading to slower real-time performance in high-dimensional state spaces. While particle filters provide greater flexibility for non-linear and non-Gaussian systems, their computational demands can hinder real-time implementation compared to the efficiency of Kalman filters.
Case Studies: Real-World Robotics Implementations
Kalman filters have been effectively utilized in autonomous drone navigation, providing precise state estimation under Gaussian noise assumptions, as demonstrated in the DJI Phantom series. Particle filters excel in mobile robot localization within complex, non-linear environments, proven by successful deployments in the Honda ASIMO and TurtleBot platforms. Comparative studies reveal that particle filters handle multi-modal distributions better, while Kalman filters offer computational efficiency in well-modeled scenarios.
Future Trends in Robotic State Estimation Techniques
Emerging trends in robotic state estimation emphasize hybrid approaches combining Kalman filters and particle filters to leverage their complementary strengths in accuracy and computational efficiency. Advances in machine learning integration enhance adaptive filtering capabilities, enabling more robust handling of non-linear and non-Gaussian noise in dynamic environments. Research increasingly focuses on scalable algorithms suitable for real-time deployment on resource-constrained robotic systems, driving innovation in sensor fusion and autonomous decision-making.
Kalman filter vs Particle filter Infographic