CAN bus offers higher data transfer speeds up to 1 Mbps and greater robustness, making it ideal for complex automotive and industrial applications requiring real-time communication. LIN bus operates at lower speeds around 20 Kbps and is cost-effective for simpler networks with fewer nodes, often used for body electronics like door and seat controllers. Both bus systems complement each other, with CAN handling critical communications and LIN managing less time-sensitive tasks.
Table of Comparison
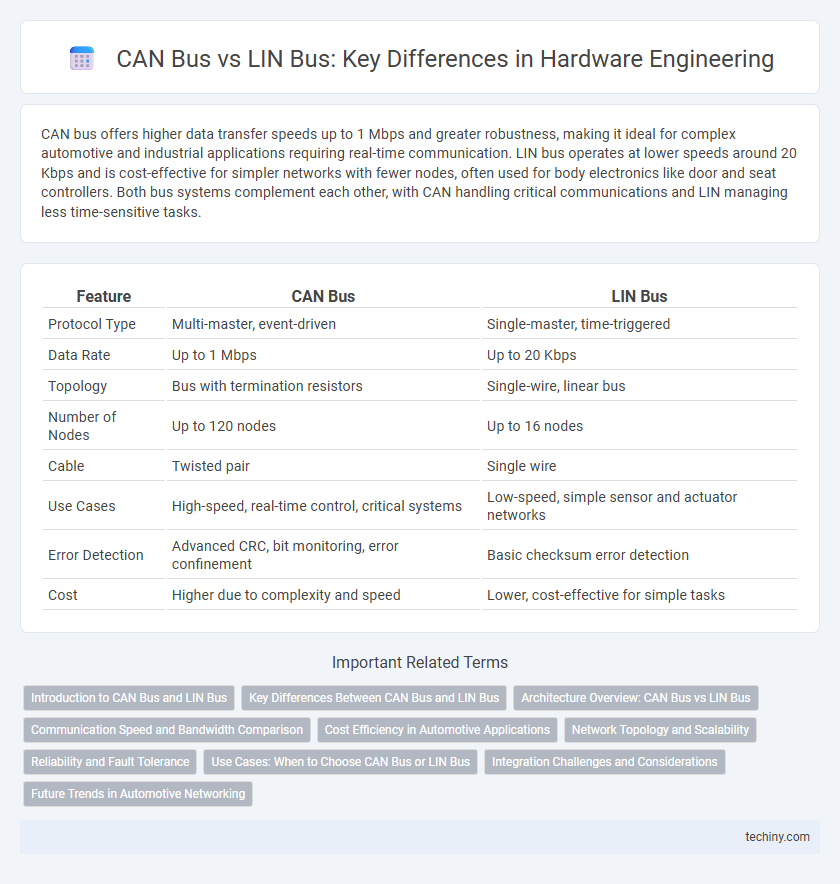
| Feature | CAN Bus | LIN Bus |
|---|---|---|
| Protocol Type | Multi-master, event-driven | Single-master, time-triggered |
| Data Rate | Up to 1 Mbps | Up to 20 Kbps |
| Topology | Bus with termination resistors | Single-wire, linear bus |
| Number of Nodes | Up to 120 nodes | Up to 16 nodes |
| Cable | Twisted pair | Single wire |
| Use Cases | High-speed, real-time control, critical systems | Low-speed, simple sensor and actuator networks |
| Error Detection | Advanced CRC, bit monitoring, error confinement | Basic checksum error detection |
| Cost | Higher due to complexity and speed | Lower, cost-effective for simple tasks |
Introduction to CAN Bus and LIN Bus
CAN Bus (Controller Area Network) is a robust vehicle bus standard designed for real-time control applications, enabling microcontrollers and devices to communicate without a host computer. LIN Bus (Local Interconnect Network) serves as a cost-effective, lower-speed serial network protocol primarily used for communication between components in automotive systems where CAN's complexity is unnecessary. Both protocols play crucial roles in automotive hardware engineering, with CAN providing high-speed, reliable communication for critical systems and LIN supporting simpler, lower bandwidth functions.
Key Differences Between CAN Bus and LIN Bus
CAN bus offers higher data rates up to 1 Mbps and supports multiple masters for complex network topologies, while LIN bus operates at lower speeds around 20 Kbps and uses a single master/slave configuration. CAN provides robust error detection mechanisms including CRC, bit stuffing, and acknowledgment, enabling reliable communication in safety-critical automotive applications, unlike LIN which has simpler error handling. The CAN protocol is typically used for powertrain and chassis communication requiring real-time performance, whereas LIN is suited for low-cost, low-speed devices such as interior car electronics and sensor interfaces.
Architecture Overview: CAN Bus vs LIN Bus
CAN bus architecture features a multi-master, message-oriented protocol with a robust error handling system and differential signaling for high-speed communication up to 1 Mbps in automotive networks. LIN bus architecture operates as a single-master, multiple-slave system using a low-cost, single-wire physical layer designed for slower data rates up to 20 Kbps in body electronics applications. The hierarchical topology of CAN supports complex, real-time control and diagnostics, whereas LIN's simpler architecture targets cost-effective, less time-critical networks.
Communication Speed and Bandwidth Comparison
CAN bus supports higher communication speeds with data rates up to 1 Mbps, making it suitable for complex automotive systems requiring fast data exchange. LIN bus operates at a maximum speed of 20 Kbps, limiting its bandwidth and typically serving simpler, low-cost sub-systems such as door or seat control modules. The significantly greater bandwidth and speed of CAN bus enable more efficient handling of multiple nodes and time-critical messages in automotive network architectures.
Cost Efficiency in Automotive Applications
CAN bus systems offer higher data rates and robust error handling but come at a higher cost due to complex transceivers and increased wiring requirements. LIN bus provides a cost-efficient alternative with simpler hardware and reduced wiring complexity, making it ideal for body control modules and low-speed communication. The choice between CAN and LIN buses in automotive applications hinges on balancing performance needs against overall system cost constraints.
Network Topology and Scalability
CAN bus utilizes a multi-master, broadcast network topology that supports high-speed communication and facilitates ease of scalability by allowing numerous nodes to be added without significant performance degradation. LIN bus employs a single-master, multiple-slave linear topology, optimized for simpler networks with lower data rates, thus limiting its scalability primarily to small, localized systems. The robust arbitration and error-handling mechanisms in CAN bus enable more complex and extensive network configurations compared to the more constrained and cost-effective LIN bus topology.
Reliability and Fault Tolerance
CAN bus exhibits higher reliability and fault tolerance compared to LIN bus due to its multi-master arbitration and error detection capabilities, including cyclic redundancy checks (CRC) and error confinement. LIN bus, designed for simpler, low-speed applications, offers limited fault tolerance with single-master communication and basic error detection mechanisms. CAN bus's robust error handling and redundancy make it the preferred choice for safety-critical automotive and industrial systems.
Use Cases: When to Choose CAN Bus or LIN Bus
CAN bus is ideal for complex automotive networks requiring high-speed data transfer and robust error handling, such as engine control units and brake systems. LIN bus suits simpler, cost-sensitive applications like door modules, seat controls, and climate controllers where lower speed and fewer nodes are sufficient. Selecting between CAN and LIN depends on system complexity, communication speed needs, and network architecture constraints.
Integration Challenges and Considerations
Integration challenges between CAN bus and LIN bus primarily involve differences in protocol complexity and data rates, with CAN supporting higher speeds up to 1 Mbps compared to LIN's typical 20 Kbps. Engineers must consider node addressing, error handling mechanisms, and bus arbitration, as CAN employs collision detection while LIN uses a master-slave approach, impacting real-time communication and fault tolerance. Power consumption and wiring complexity also influence integration decisions, where LIN offers simpler, cost-effective single-wire solutions, contrasting with CAN's differential signaling requiring twisted pair cabling.
Future Trends in Automotive Networking
CAN bus technology continues to evolve with higher data rates and improved error management, supporting increasingly complex automotive systems and autonomous driving features. LIN bus remains essential for cost-effective, low-speed communications in body control modules, benefiting from advancements in integration with Ethernet and wireless protocols. Future trends emphasize the convergence of CAN, LIN, and Ethernet networks to create scalable, secure, and real-time communication architectures for next-generation vehicles.
CAN bus vs LIN bus Infographic