An Inertial Measurement Unit (IMU) integrates multiple sensors, typically including gyroscopes, accelerometers, and sometimes magnetometers, to provide comprehensive motion and orientation data. Gyroscopes specifically measure angular velocity, offering precise rotational movement information critical for navigation and stabilization systems. Selecting between an IMU and a standalone gyroscope depends on the application's complexity, with IMUs delivering enhanced accuracy through sensor fusion for dynamic and multi-axis environments.
Table of Comparison
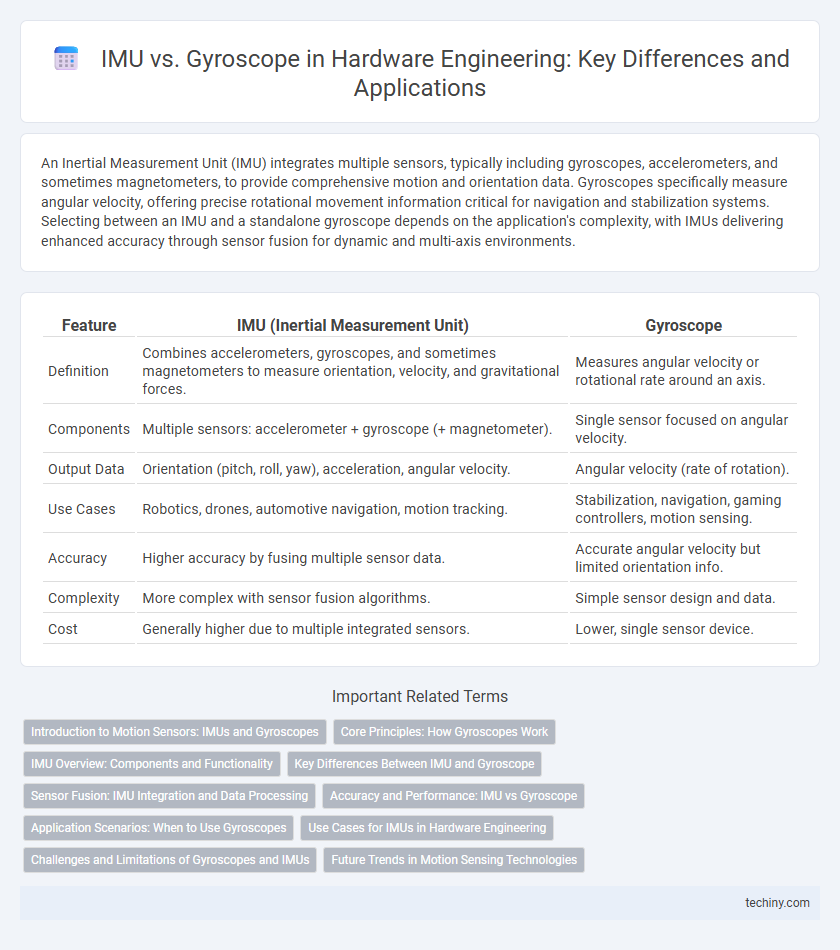
| Feature | IMU (Inertial Measurement Unit) | Gyroscope |
|---|---|---|
| Definition | Combines accelerometers, gyroscopes, and sometimes magnetometers to measure orientation, velocity, and gravitational forces. | Measures angular velocity or rotational rate around an axis. |
| Components | Multiple sensors: accelerometer + gyroscope (+ magnetometer). | Single sensor focused on angular velocity. |
| Output Data | Orientation (pitch, roll, yaw), acceleration, angular velocity. | Angular velocity (rate of rotation). |
| Use Cases | Robotics, drones, automotive navigation, motion tracking. | Stabilization, navigation, gaming controllers, motion sensing. |
| Accuracy | Higher accuracy by fusing multiple sensor data. | Accurate angular velocity but limited orientation info. |
| Complexity | More complex with sensor fusion algorithms. | Simple sensor design and data. |
| Cost | Generally higher due to multiple integrated sensors. | Lower, single sensor device. |
Introduction to Motion Sensors: IMUs and Gyroscopes
In hardware engineering, inertial measurement units (IMUs) integrate gyroscopes and accelerometers to provide comprehensive motion tracking by measuring angular velocity, acceleration, and orientation. Gyroscopes alone detect rotational movement with high precision but lack the ability to capture linear motion and orientation changes without supplemental sensors. Combining gyroscopes with accelerometers in IMUs enhances motion sensing accuracy in applications such as robotics, aerospace navigation, and virtual reality systems.
Core Principles: How Gyroscopes Work
Gyroscopes operate based on the principle of angular momentum, maintaining the orientation of a spinning rotor relative to an inertial frame. This core principle enables gyroscopes to measure angular velocity with high precision by detecting changes in the rotor's axis of rotation caused by external forces. Unlike inertial measurement units (IMUs), which combine accelerometers and gyroscopes for comprehensive motion tracking, gyroscopes specifically focus on rotational measurement using the conservation of angular momentum.
IMU Overview: Components and Functionality
An Inertial Measurement Unit (IMU) integrates accelerometers, gyroscopes, and sometimes magnetometers to provide comprehensive motion sensing and orientation data. The accelerometer measures linear acceleration along multiple axes, while the gyroscope detects angular velocity, enabling precise tracking of rotational movements. By fusing data from these sensors, an IMU delivers accurate real-time information essential for navigation, stabilization, and motion tracking in hardware engineering applications.
Key Differences Between IMU and Gyroscope
An Inertial Measurement Unit (IMU) integrates multiple sensors, including gyroscopes, accelerometers, and sometimes magnetometers, whereas a gyroscope measures angular velocity exclusively. IMUs provide comprehensive motion tracking by combining data from these sensors to calculate orientation, velocity, and acceleration. Gyroscopes offer precise rotational information but lack the multi-dimensional sensing capabilities present in IMUs.
Sensor Fusion: IMU Integration and Data Processing
Sensor fusion in hardware engineering integrates gyroscope data with accelerometer and magnetometer inputs within an Inertial Measurement Unit (IMU) to provide accurate orientation and motion tracking. IMU integration leverages algorithms such as Kalman filters or complementary filters to merge sensor outputs, reducing individual sensor noise and drift. This data processing enhances real-time navigation, robotics, and augmented reality applications by delivering precise and reliable motion analysis.
Accuracy and Performance: IMU vs Gyroscope
In hardware engineering, IMUs (Inertial Measurement Units) integrate gyroscopes, accelerometers, and sometimes magnetometers to provide comprehensive motion tracking with higher accuracy and performance than standalone gyroscopes. IMUs compensate for gyroscope drift and improve orientation precision through sensor fusion algorithms, enhancing stability in dynamic environments. Gyroscopes alone deliver high angular velocity sensitivity but lack the multi-axis motion data and error correction capabilities inherent in IMU systems.
Application Scenarios: When to Use Gyroscopes
Gyroscopes are essential in applications requiring precise angular velocity measurements such as drone stabilization, robotics, and virtual reality headsets, where accurate orientation tracking is critical. Unlike IMUs, which combine accelerometers and gyroscopes for comprehensive motion sensing, standalone gyroscopes excel in scenarios focused solely on rotational movement analysis. Their high sensitivity and low noise performance make them ideal for aerospace navigation systems and automotive stability control.
Use Cases for IMUs in Hardware Engineering
In hardware engineering, IMUs (Inertial Measurement Units) are preferred over standalone gyroscopes for applications requiring comprehensive motion tracking, such as robotics, aerospace, and wearable technology. IMUs combine accelerometers, gyroscopes, and sometimes magnetometers, enabling precise measurement of orientation, velocity, and acceleration essential for navigation systems and stabilization control. Their integration enhances sensor fusion algorithms, improving the accuracy and reliability of real-time motion analysis in complex engineering projects.
Challenges and Limitations of Gyroscopes and IMUs
Gyroscopes face challenges including drift over time, susceptibility to vibration-induced errors, and limited sensitivity at low angular velocities, affecting long-term accuracy in hardware engineering applications. IMUs, integrating multiple sensors like accelerometers and gyroscopes, encounter limitations such as sensor fusion complexity, increased power consumption, and cumulative error buildup requiring frequent recalibration. Both technologies demand advanced algorithms and hardware solutions to mitigate noise, thermal variations, and mechanical stress for reliable motion sensing performance.
Future Trends in Motion Sensing Technologies
Future trends in motion sensing technologies emphasize the integration of IMUs (Inertial Measurement Units) and gyroscopes with advanced sensor fusion algorithms to enhance precision and reduce drift in navigation systems. Miniaturization and low-power consumption improvements are driving the adoption of MEMS-based IMUs, enabling wider use in wearable devices, autonomous vehicles, and augmented reality. Development in AI-assisted calibration and real-time data processing promises significant advancements in accuracy and adaptability for next-generation motion sensing hardware.
IMU vs Gyroscope Infographic