Bare-metal programming offers direct control over hardware with minimal overhead, making it ideal for time-critical applications requiring low latency and deterministic performance. In contrast, RTOS (Real-Time Operating System) provides task scheduling, resource management, and inter-task communication, enhancing system reliability and scalability in complex embedded systems. Choosing between bare-metal and RTOS depends on the application's complexity, resource constraints, and real-time requirements.
Table of Comparison
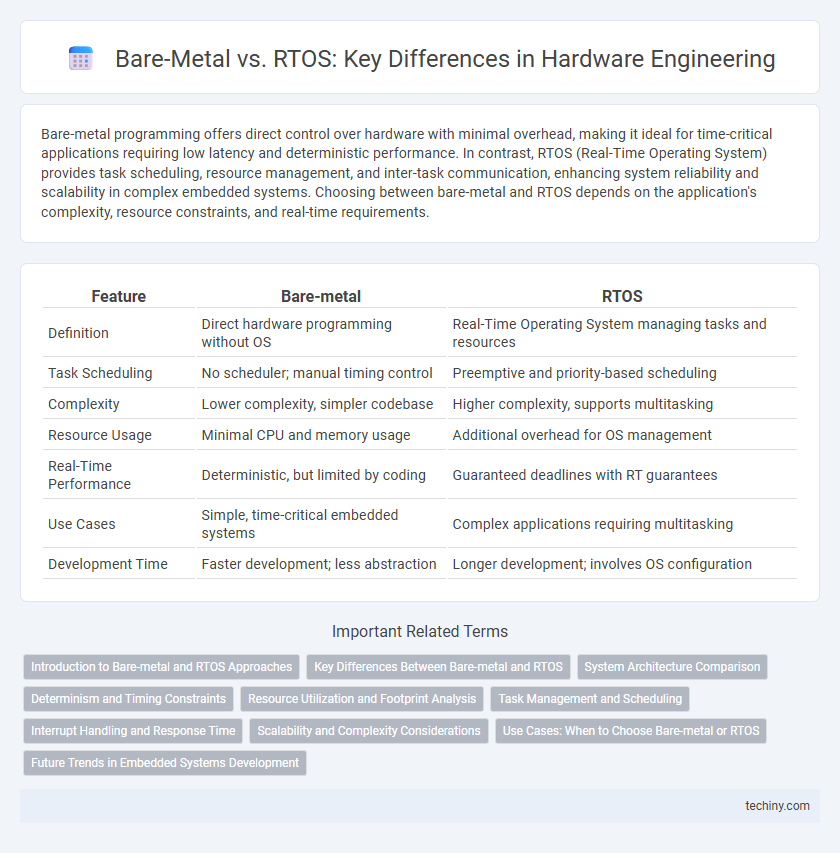
| Feature | Bare-metal | RTOS |
|---|---|---|
| Definition | Direct hardware programming without OS | Real-Time Operating System managing tasks and resources |
| Task Scheduling | No scheduler; manual timing control | Preemptive and priority-based scheduling |
| Complexity | Lower complexity, simpler codebase | Higher complexity, supports multitasking |
| Resource Usage | Minimal CPU and memory usage | Additional overhead for OS management |
| Real-Time Performance | Deterministic, but limited by coding | Guaranteed deadlines with RT guarantees |
| Use Cases | Simple, time-critical embedded systems | Complex applications requiring multitasking |
| Development Time | Faster development; less abstraction | Longer development; involves OS configuration |
Introduction to Bare-metal and RTOS Approaches
Bare-metal programming involves writing software directly on the hardware without an underlying operating system, allowing for maximum control and minimal latency in resource-constrained embedded systems. Real-Time Operating Systems (RTOS) provide task scheduling, inter-task communication, and timing control, enabling deterministic behavior essential for time-critical applications. Choosing between bare-metal and RTOS depends on factors such as system complexity, response time requirements, and resource availability.
Key Differences Between Bare-metal and RTOS
Bare-metal systems run directly on hardware without an operating system, offering minimal latency and maximum control but requiring extensive manual management of tasks and resources. Real-Time Operating Systems (RTOS) provide multitasking, task scheduling, and inter-process communication, enabling efficient handling of time-critical applications and complex workflows. The key differences involve task management, with RTOS supporting preemptive scheduling and synchronization mechanisms, while bare-metal relies on simple loops and interrupts for control flow.
System Architecture Comparison
Bare-metal systems offer direct hardware access with minimal latency, ideal for applications demanding high performance and low memory usage, but lack advanced management features. RTOS-based systems provide multitasking, real-time scheduling, and inter-process communication, enhancing system reliability and scalability in complex hardware architectures. Choosing between bare-metal and RTOS depends on requirements for system determinism, resource constraints, and application complexity.
Determinism and Timing Constraints
Bare-metal systems provide maximum determinism with minimal latency, allowing direct hardware control essential for strict timing constraints in hardware engineering. RTOS introduces scheduling overhead but offers enhanced task management and predictability suitable for complex timing requirements. Selecting between bare-metal and RTOS depends on the balance between absolute timing precision and the need for multitasking and system scalability.
Resource Utilization and Footprint Analysis
Bare-metal systems directly access hardware, resulting in minimal resource utilization and a smaller memory footprint, ideal for applications with stringent performance and size constraints. RTOS introduces overhead due to task scheduling, inter-task communication, and resource management, increasing CPU usage and memory consumption. Footprint analysis reveals bare-metal implementations often require less than 50 KB of RAM, whereas RTOS-based solutions typically consume upwards of 100 KB depending on system complexity.
Task Management and Scheduling
Bare-metal systems provide direct control over hardware with simple loop-based or interrupt-driven task management, delivering minimal scheduling overhead and maximum performance. RTOS offers advanced task management with preemptive scheduling, prioritizing multiple concurrent tasks and enabling deterministic real-time behavior. Efficient context switching and priority-based scheduling in RTOS ensure better multitasking and system responsiveness compared to bare-metal implementations.
Interrupt Handling and Response Time
Bare-metal systems offer minimal interrupt latency by directly handling hardware interrupts without the overhead of an operating system, resulting in faster response times crucial for time-sensitive applications. RTOS-based designs provide structured interrupt management with prioritized interrupt service routines (ISRs), enabling better scalability and deterministic behavior under complex workloads. Choosing between bare-metal and RTOS depends on the trade-off between simplicity with ultra-low latency and the need for multitasking with predictable interrupt response.
Scalability and Complexity Considerations
Bare-metal systems offer minimal overhead, enabling fast execution but limited scalability due to lack of built-in multitasking and resource management, making them suitable for simple, low-complexity applications. RTOS provides a structured environment with predefined task scheduling, inter-task communication, and memory management, significantly enhancing scalability for complex projects with multiple concurrent processes. The inherent complexity of RTOS requires careful design and resource allocation but supports modular development and easier integration of new functionalities.
Use Cases: When to Choose Bare-metal or RTOS
Bare-metal programming is ideal for applications requiring minimal latency and simple control, such as sensor interfacing and low-power embedded devices, where direct hardware access ensures maximum performance. RTOS is preferred in complex systems like automotive control units and industrial automation, providing task scheduling, real-time responsiveness, and resource management across multiple concurrent processes. Choosing between bare-metal and RTOS depends on the real-time requirements, system complexity, and resource constraints of the hardware environment.
Future Trends in Embedded Systems Development
Future trends in embedded systems development emphasize enhanced performance and scalability by integrating bare-metal approaches with lightweight RTOS solutions, optimizing resource-constrained environments. Advances in AI-driven adaptive scheduling and real-time analytics are pushing embedded systems towards smarter, more autonomous operations. The increasing adoption of multicore processors and heterogeneous computing architectures will drive innovation in hybrid bare-metal and RTOS design paradigms, balancing deterministic control with flexible task management.
Bare-metal vs RTOS Infographic