Interrupt-driven systems enhance hardware efficiency by allowing the processor to execute other tasks until an interrupt signal indicates the need for attention, reducing unnecessary CPU cycles compared to polling. Polling continuously checks device status, leading to higher CPU usage and potential latency in response time. Choosing between interrupt-driven and polling methods depends on application requirements for responsiveness and system resource optimization.
Table of Comparison
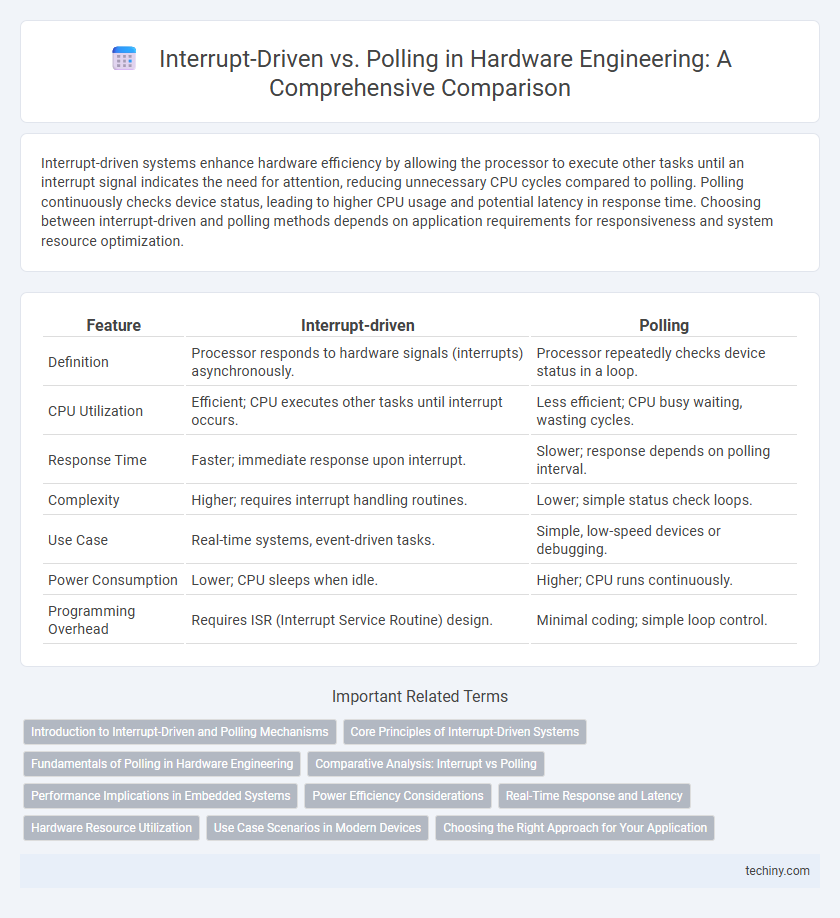
| Feature | Interrupt-driven | Polling |
|---|---|---|
| Definition | Processor responds to hardware signals (interrupts) asynchronously. | Processor repeatedly checks device status in a loop. |
| CPU Utilization | Efficient; CPU executes other tasks until interrupt occurs. | Less efficient; CPU busy waiting, wasting cycles. |
| Response Time | Faster; immediate response upon interrupt. | Slower; response depends on polling interval. |
| Complexity | Higher; requires interrupt handling routines. | Lower; simple status check loops. |
| Use Case | Real-time systems, event-driven tasks. | Simple, low-speed devices or debugging. |
| Power Consumption | Lower; CPU sleeps when idle. | Higher; CPU runs continuously. |
| Programming Overhead | Requires ISR (Interrupt Service Routine) design. | Minimal coding; simple loop control. |
Introduction to Interrupt-Driven and Polling Mechanisms
Interrupt-driven and polling mechanisms are fundamental techniques used in hardware engineering to manage communication between a processor and peripheral devices. Interrupt-driven systems enable devices to signal the processor asynchronously, allowing immediate attention to critical tasks, which optimizes CPU utilization and responsiveness. Polling involves the processor repeatedly checking the status of a device at regular intervals, which can be simpler to implement but often leads to inefficient resource use and increased latency in handling events.
Core Principles of Interrupt-Driven Systems
Interrupt-driven systems rely on hardware signals to immediately alert the processor of critical events, enabling timely response without continuous CPU intervention. This core principle reduces latency and improves system efficiency by allowing the CPU to execute other tasks until an interrupt occurs. Interrupt-driven designs prioritize event-driven execution, minimizing wasted cycles compared to polling methods that constantly check device status.
Fundamentals of Polling in Hardware Engineering
Polling in hardware engineering involves the continuous checking of device status by the CPU to detect events or data readiness. This method consumes more CPU cycles compared to interrupt-driven mechanisms, as it requires active querying rather than passive waiting. Polling is simpler to implement and can be effective for predictable or low-frequency event detection in embedded systems.
Comparative Analysis: Interrupt vs Polling
Interrupt-driven and polling methods serve as fundamental approaches for CPU communication with peripheral devices in hardware engineering. Interrupt-driven systems enhance efficiency by allowing the CPU to execute other tasks until an interrupt signal demands immediate attention, reducing idle CPU time typical in polling. In contrast, polling continuously checks device status, leading to higher CPU usage and slower response times, but offers simpler implementation and predictable timing characteristics beneficial in real-time systems.
Performance Implications in Embedded Systems
Interrupt-driven systems in embedded hardware engineering offer superior performance by allowing the CPU to execute other tasks until an interrupt signal demands immediate attention, minimizing idle time and improving efficiency. Polling repeatedly checks device status, leading to wasted CPU cycles and increased latency, which can degrade real-time response and power consumption in resource-constrained environments. Optimizing system design by leveraging interrupt-driven mechanisms enhances throughput, reduces energy usage, and supports better multitasking compared to continuous polling approaches.
Power Efficiency Considerations
Interrupt-driven systems enhance power efficiency by allowing the processor to enter low-power sleep modes until an event occurs, minimizing active CPU cycles. Polling requires continuous CPU engagement to check device status, leading to higher power consumption and reduced battery life. Choosing interrupt-driven methods is crucial in embedded and portable hardware designs where energy constraints are paramount.
Real-Time Response and Latency
Interrupt-driven systems in hardware engineering excel in providing real-time response by immediately signaling the CPU when an event occurs, significantly reducing latency. Polling mechanisms, in contrast, regularly check device status at fixed intervals, which can introduce higher latency and delay critical processing in time-sensitive applications. Optimizing for minimal latency and deterministic behavior often favors interrupt-driven designs in real-time embedded systems.
Hardware Resource Utilization
Interrupt-driven systems optimize hardware resource utilization by allowing the CPU to perform other tasks until an interrupt signals the need for immediate attention, reducing idle waiting times. Polling continuously checks the status of a device, resulting in higher CPU usage and inefficient resource allocation during idle periods. Employing interrupt-driven methods enhances overall system efficiency by minimizing wasted cycles and optimizing processing power distribution.
Use Case Scenarios in Modern Devices
Interrupt-driven systems excel in modern devices requiring real-time responsiveness and low power consumption, such as smartphones and IoT sensors, by enabling efficient CPU utilization and immediate event handling. Polling remains suitable for simple, predictable tasks with low interrupt overhead, like basic input devices and legacy embedded systems, where constant status checks reduce complexity. Hybrid approaches often emerge in advanced hardware, balancing the responsiveness of interrupts with the simplicity of polling to optimize performance and resource management.
Choosing the Right Approach for Your Application
Interrupt-driven mechanisms offer efficient CPU utilization by responding immediately to hardware signals, making them ideal for real-time and power-sensitive applications. Polling provides simpler implementation and predictable timing by continuously checking device status, suitable for low-speed or less time-critical tasks. Selecting between interrupt-driven and polling approaches depends on application requirements such as latency tolerance, power constraints, and system complexity.
Interrupt-driven vs Polling Infographic