I2C and CAN are both communication protocols widely used in hardware engineering for device interconnectivity, with I2C primarily suited for short-distance, low-speed communication between integrated circuits on a single board. CAN excels in robust, long-distance communication within automotive and industrial environments, offering high noise immunity and error detection features. Choosing between I2C and CAN depends on the specific application requirements such as communication speed, distance, complexity, and fault tolerance.
Table of Comparison
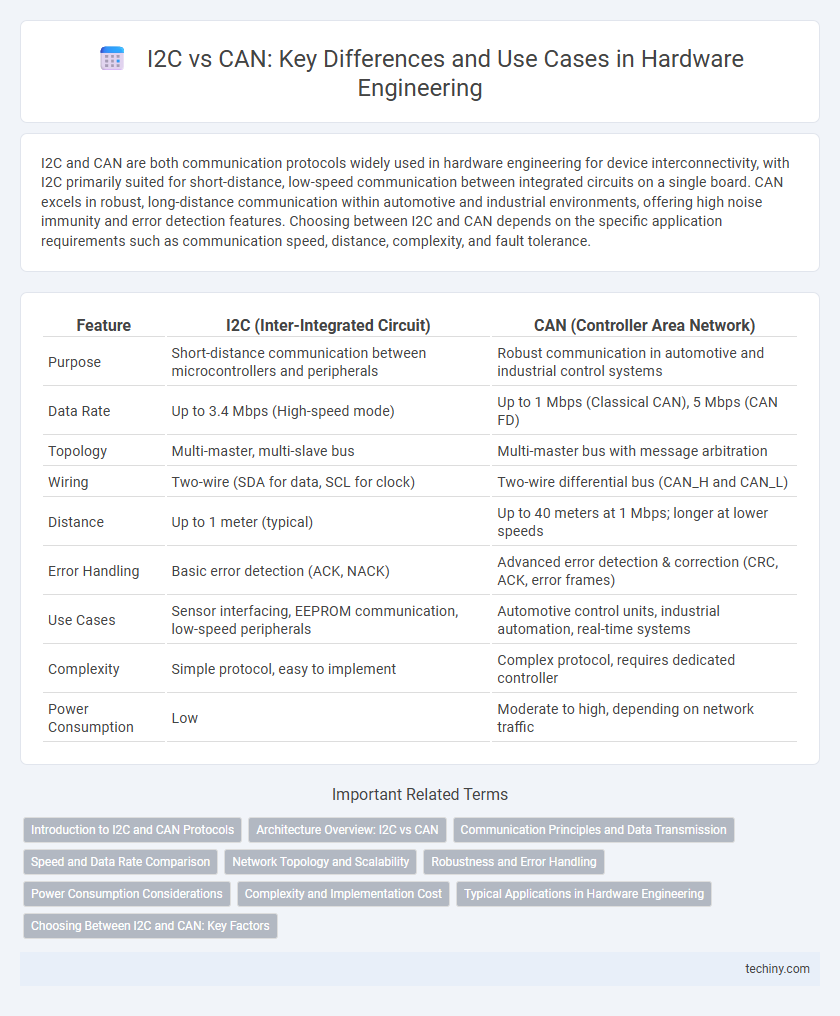
| Feature | I2C (Inter-Integrated Circuit) | CAN (Controller Area Network) |
|---|---|---|
| Purpose | Short-distance communication between microcontrollers and peripherals | Robust communication in automotive and industrial control systems |
| Data Rate | Up to 3.4 Mbps (High-speed mode) | Up to 1 Mbps (Classical CAN), 5 Mbps (CAN FD) |
| Topology | Multi-master, multi-slave bus | Multi-master bus with message arbitration |
| Wiring | Two-wire (SDA for data, SCL for clock) | Two-wire differential bus (CAN_H and CAN_L) |
| Distance | Up to 1 meter (typical) | Up to 40 meters at 1 Mbps; longer at lower speeds |
| Error Handling | Basic error detection (ACK, NACK) | Advanced error detection & correction (CRC, ACK, error frames) |
| Use Cases | Sensor interfacing, EEPROM communication, low-speed peripherals | Automotive control units, industrial automation, real-time systems |
| Complexity | Simple protocol, easy to implement | Complex protocol, requires dedicated controller |
| Power Consumption | Low | Moderate to high, depending on network traffic |
Introduction to I2C and CAN Protocols
I2C (Inter-Integrated Circuit) protocol enables short-distance communication between microcontrollers and peripheral devices using a simple two-wire interface for clock and data transmission. CAN (Controller Area Network) protocol supports robust, high-speed communication in automotive and industrial systems through multi-master message broadcasting over a differential pair. Both protocols serve distinct roles in hardware engineering, with I2C favored for low-speed, intra-board communication and CAN preferred for reliable, longer-distance, fault-tolerant networking.
Architecture Overview: I2C vs CAN
I2C (Inter-Integrated Circuit) employs a multi-master, multi-slave, single-ended, two-wire serial bus architecture suitable for short-distance communication between integrated circuits on the same PCB. CAN (Controller Area Network) features a multi-master, message-oriented protocol with differential signaling over twisted pair cables, designed for robust communication in automotive and industrial environments. I2C supports addressing up to 7- or 10-bit devices with simple arbitration, while CAN uses prioritized message identifiers to ensure real-time data transmission and error detection.
Communication Principles and Data Transmission
I2C (Inter-Integrated Circuit) uses a two-wire, serial communication protocol with a master-slave architecture, supporting multiple devices on the same bus through addressable lines, ideal for short-distance, low-speed data transmission up to 3.4 Mbps. CAN (Controller Area Network) employs a multi-master, message-oriented protocol with robust error detection and arbitration, enabling reliable, high-speed communication up to 1 Mbps in noisy automotive and industrial environments. Both protocols handle data transmission efficiently but differ in complexity and application scope, with I2C optimized for simple intra-board communication and CAN designed for distributed real-time control systems.
Speed and Data Rate Comparison
I2C supports data rates up to 3.4 Mbps with standard modes like Fast-mode Plus, suitable for short-distance communication on the same PCB. CAN bus offers higher robustness with speeds up to 1 Mbps for Classic CAN and up to 5 Mbps for CAN FD, designed for automotive and industrial networks requiring reliable long-distance data transmission. The choice between I2C and CAN depends on system requirements for speed, data integrity, and communication range in hardware engineering designs.
Network Topology and Scalability
I2C utilizes a simple bus topology ideal for short-distance, low-speed communication between a limited number of devices, typically within a single PCB, which restricts its scalability in larger, complex systems. CAN supports a multi-master bus topology with robust error handling, enabling scalable, high-speed communication across numerous nodes over longer distances, making it suitable for automotive and industrial network applications. The flexible wiring and fault tolerance of CAN make it preferable for expansive networks requiring reliable data transmission and easy integration of additional devices.
Robustness and Error Handling
CAN (Controller Area Network) offers superior robustness and error handling compared to I2C (Inter-Integrated Circuit) due to its differential signaling and built-in error detection and correction mechanisms like CRC, bit stuffing, and acknowledgment checking. I2C, while simpler and cost-effective for short-distance communication, lacks advanced error correction and relies mainly on basic ACK/NACK for error detection. For industrial environments requiring high reliability and noise immunity, CAN's comprehensive error management and fault confinement features make it the preferred choice in hardware engineering applications.
Power Consumption Considerations
I2C interfaces typically consume less power than CAN systems due to their simpler single-ended signaling and lower operating frequencies, making them suitable for low-power embedded applications. CAN networks, while more robust and offering higher noise immunity, require higher power because of differential signaling and longer communication distances. Engineers must balance power consumption with system reliability when choosing between I2C and CAN in power-sensitive hardware designs.
Complexity and Implementation Cost
I2C interfaces feature lower complexity and reduced implementation cost due to simple two-wire design and widespread microcontroller support. CAN networks demand more intricate hardware for robust error handling and arbitration, increasing development time and overall expenses. Selecting I2C suits low-speed, short-distance communication, whereas CAN justifies higher costs for real-time, multi-node automotive and industrial applications.
Typical Applications in Hardware Engineering
I2C is widely used in hardware engineering for short-distance communication between microcontrollers and peripheral devices such as sensors, EEPROMs, and RTC modules, making it ideal for embedded systems and consumer electronics. CAN is typically employed in automotive and industrial environments due to its robustness and fault tolerance, enabling reliable communication across multiple electronic control units (ECUs) and industrial machinery. The choice between I2C and CAN depends on factors like communication distance, noise immunity, and network complexity in the hardware design.
Choosing Between I2C and CAN: Key Factors
Choosing between I2C and CAN protocols depends on factors such as communication speed, distance, and noise immunity. I2C suits short-distance, low-speed communication within a PCB or between components, offering simplicity and lower pin count. CAN is preferred for robust, long-distance automotive or industrial networks requiring high noise immunity and error detection capabilities.
I2C vs CAN Infographic